图
广度优先搜索 & 深度优先搜索
<?php
class Node
{
public $linkNodes;
public $value;
public function __construct($value)
{
$this->value = $value;
}
}
class Graph
{
public function build(array $array)
{
$result = [];
$nodes = array_keys($array);
foreach ($nodes as $node) {
$result[$node] = new Node($node);
}
foreach ($array as $node => $arr) {
foreach ($arr as $linkNode) {
$result[$node]->linkNodes [] = new Node($linkNode);
}
}
return $result;
}
public function BFS($graph, $begin, $end)
{
$this->check($graph, $begin, $end);
$queue = [];
array_push($queue, $graph[$begin]);
$isFind = [
$begin => true
];
while (!empty($queue)) {
// 先入先出,横向搜索
$node = array_shift($queue);
l($node->value);
if ($node->value == $end) {
return true;
}
if (empty($node->linkNodes)) {
continue;
}
// 压入候补节点
foreach ($node->linkNodes as $linkNode) {
if (!empty($isFind[$linkNode->value])) {
continue;
}
$isFind[$linkNode->value] = true;
$linkNode->linkNodes = $graph[$linkNode->value]->linkNodes;
array_push($queue, $linkNode);
}
}
return true;
}
public function DFS($graph, $begin, $end)
{
$this->check($graph, $begin, $end);
$stack = [];
array_push($stack, $graph[$begin]);
$isFind = [
$begin => true
];
while (!empty($stack)) {
// 先入后出,纵向搜索
$node = array_pop($stack);
l($node->value);
if ($node->value == $end) {
return true;
}
if (empty($node->linkNodes)) {
continue;
}
// 压入候补节点
foreach ($node->linkNodes as $linkNode) {
if (!empty($isFind[$linkNode->value])) {
continue;
}
$isFind[$linkNode->value] = true;
$linkNode->linkNodes = $graph[$linkNode->value]->linkNodes;
array_push($stack, $linkNode);
}
}
return true;
}
protected function check($graph, $begin, $end)
{
if (empty($graph[$begin]) || empty($graph[$end])) {
echo "node not exists";
exit;
}
}
}
// 有向图
$array = [
'A' => ['B', 'C', 'D'],
'B' => ['E', 'F'],
'C' => ['G', 'H'],
'D' => ['I', 'J'],
'E' => [],
'F' => [],
'G' => [],
'H' => [],
'I' => [],
'J' => [],
];
// 广度优先搜索
$graph = new Graph();
$result = $graph->build($array);
$graph->BFS($result, 'A', 'H');
line();
// 深度优先搜索
$graph = new Graph();
$result = $graph->build($array);
$graph->DFS($result, 'A', 'H');
line();
line();
// 普通图
$array = [
'A' => ['B', 'F'],
'B' => ['A', 'C', 'D'],
'C' => ['B', 'D', 'E'],
'D' => ['B', 'C'],
'E' => ['C'],
'F' => ['A', 'G', 'H'],
'G' => ['F', 'H'],
'H' => ['F', 'G']
];
// 广度优先搜索
$graph = new Graph();
$result = $graph->build($array);
$graph->BFS($result, 'A', 'E');
line();
// 深度优先搜索
$graph = new Graph();
$result = $graph->build($array);
$graph->DFS($result, 'A', 'E');
line();
line();
// 闭环图
$array = [
'A' => ['B', 'F'],
'B' => ['A', 'C'],
'C' => ['B', 'D'],
'D' => ['C', 'E'],
'E' => ['D', 'F'],
'F' => ['A', 'E'],
];
// 广度优先搜索
$graph = new Graph();
$result = $graph->build($array);
$graph->BFS($result, 'A', 'D');
line();
// 深度优先搜索
$graph = new Graph();
$result = $graph->build($array);
$graph->DFS($result, 'A', 'D');
function l($string)
{
echo $string . ' -> ';
}
function line()
{
echo '<br>';
}
function p($data)
{
echo '<pre>';
print_r($data);
}
贝尔曼福特算法
# 给所有节点编号
nodes = {
'A': 0,
'B': 1,
'C': 2,
'D': 3,
'E': 4,
'F': 5,
'G': 6
}
# 节点编号映射节点
nodes_flip = dict((i, v) for i, v in enumerate(nodes))
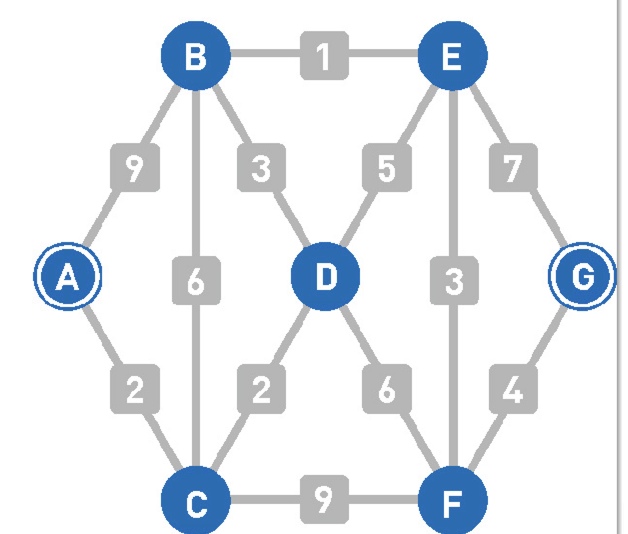
# 把图从左到右列出,如A节点到B节点权重为9,表示为:[0,1,9]
graph = [
[0, 1, 9],
[0, 2, 2],
[1, 2, 6],
[1, 3, 3],
[1, 4, 1],
[2, 3, 2],
[2, 5, 9],
[3, 4, 5],
[3, 5, 6],
[4, 5, 3],
[4, 6, 7],
[5, 6, 4],
]
INF = float('inf')
N = len(nodes)
# 初始化各点到其他点的权重,不直达用inf表示(行、列索引都表示当前节点的编号)
def init():
w = [[INF if j != i else 0 for j in range(N)] for i in range(N)]
for i in graph:
w[i[0]][i[1]] = i[2]
w[i[1]][i[0]] = i[2]
return w
weight = init()
'''
设置起始点为0,其他点为∞
遍历所有边,边的权重+出发点的权重<到达点的权重,更新到达点(出发点和到达点是指边的两个顶点)
重复N-1轮,N为节点数量(如果中间没有更新可提前退出)
如果重复N-1轮后还能更新,说明是一个存在负权重的闭环,无最短路径
'''
def bellman_ford(src, target):
src_index = nodes[src]
target_index = nodes[target]
# 距离列表(用于记录起始点到各点的距离)
# 初始节点为0,其他为INF
dist = [0 if i == src_index else INF for i in range(N)]
# 更新列表(用于记录每个节点最后被哪个节点更新,用于追踪轨迹)
last_update = [src_index if i != INF else -1 for i in dist]
# 松弛n-1次,因为最短路径的深度最多是n-1,n为结点数目
for i in range(N - 1):
change = False
# 分别遍历边的两个顶点,从而实现遍历所有边
for j in range(N):
for k in range(N):
if dist[j] > dist[k] + weight[j][k]:
dist[j] = dist[k] + weight[j][k]
# 记录更新该结点的结点编号
last_update[j] = k
# 标记更改状态
change = True
# 如果本轮未作出更改,说明已完成
if not change:
break
# 判断负权回路
for i in range(N):
for j in range(N):
if dist[j] > dist[i] + weight[j][i]:
raise BaseException("存在负权回路")
# 输出从起点到终点的路径结点
tmp = target_index
path = []
while tmp != src_index:
path.append(nodes_flip[tmp])
tmp = last_update[tmp]
path.append(src)
print("->".join([node for node in reversed(path)]))
return dist[target_index]
res = bellman_ford('A', 'G')
print(res)
迪杰斯特拉算法
# 给所有节点编号
nodes = {
'A': 0,
'B': 1,
'C': 2,
'D': 3,
'E': 4,
'F': 5,
'G': 6
}
# 节点编号映射节点
nodes_flip = dict((i, v) for i, v in enumerate(nodes))
# 把图从左到右列出,如A节点到B节点权重为9,表示为:[0,1,9]
graph = [
[0, 1, 9],
[0, 2, 2],
[1, 2, 6],
[1, 3, 3],
[1, 4, 1],
[2, 3, 2],
[2, 5, 9],
[3, 4, 5],
[3, 5, 6],
[4, 5, 3],
[4, 6, 7],
[5, 6, 4],
]
INF = float('inf')
N = len(nodes)
# 初始化各点到其他点的权重,不直达用inf表示(行、列索引都表示当前节点的编号)
def init():
w = [[INF if j != i else 0 for j in range(N)] for i in range(N)]
for i in graph:
w[i[0]][i[1]] = i[2]
w[i[1]][i[0]] = i[2]
return w
weight = init()
'''
设置起始点为0,其他点为∞
创建未达列表(除起点外的所有点)
从起点出发,找到能够直达且权重最小的点,更新相关距离列表
再根据被找到的点,去找它的能够直达的点,只要权重小于起点的距离列表,更新距离列表
然后记录被更新节点是被哪个节点更新的
并把当前找到的节点从未达列表中剔除
循环处理,直到未达列表被清空
'''
def dijkstra(src, target):
src_index = nodes[src]
target_index = nodes[target]
# 未到的点的索引(剔除掉起始点)
u = [i for i in range(N)]
u.remove(src_index)
# 距离列表(用于记录起始点到各点的距离)
dist = weight[src_index]
# 更新列表(用于记录每个节点最后被哪个节点更新,用于追踪轨迹)
last_update = [src_index if i != INF else -1 for i in dist]
# 所有点都到过后,退出循环
while u:
idx = 0
min_dist = INF
# 找距离最近的点并标记该点的索引和最近距离
# 每次距离列表会被当次找到的点的相邻点更新(满足条件)
# 而每次min_dist都会被重置为INF,所以每次都能找到idx
for i in range(N):
if i in u and dist[i] < min_dist:
min_dist = dist[i]
idx = i
# 找到的点从未达列表中移除
u.remove(idx)
# 更新距离列表(用当次找到的点)
for j in range(N):
if j in u and weight[idx][j] + min_dist < dist[j]:
dist[j] = weight[idx][j] + min_dist
# 记录更新该结点的结点编号
last_update[j] = idx
# 输出从起点到终点的路径结点
tmp = target_index
path = []
while tmp != src_index:
path.append(nodes_flip[tmp])
tmp = last_update[tmp]
path.append(src)
print("->".join([str(i) for i in reversed(path)]))
return dist[target_index]
res = dijkstra('A', 'G')
print(res)